Genesis, ein gerade veröffentlichter Open-Source-Physiksimulator, verschiebt die Grenzen virtueller Umgebungen für das Robotertraining und die Entwicklung verkörperter KI, wobei die Leistung bestehenden Lösungen weit überlegen ist.
Eine Gruppe akademischer und industrieller Forscher stellte Genesis vor, a
Simulator physischer Umgebungen mit beispielloser Leistung. Diese Open-Source-Plattform ist für Anwendungen in den Bereichen Robotik und verkörperte künstliche Intelligenz konzipiert.
43 Millionen Bilder pro Sekunde
Laut der offiziellen Projektdokumentation verwendet Genesis eine optimierte Physik-Engine, die die Leistung des GPU-Parallel-Computings nutzt. Diese Technologie ermöglicht es, in bestimmten Manipulationsszenen eine beispiellose Simulationsgeschwindigkeit von bis zu 43 Millionen Bildern pro Sekunde (FPS) zu erreichen. Roboter können so in einer virtuellen Umgebung bis zu 430.000 Mal schneller trainieren als in der realen Welt. Genesis läuft vollständig in Python und übertrifft die Leistung bestehender Lösungen wie Nvidias Isaac Gym bei weitem mit Geschwindigkeiten, die bis zu 80-mal schneller sind, behaupten die Macher des Projekts. Mit Grafikkarten, die denen von Videospielen ähneln, kann das System bis zu 100.000 Kopien einer Simulationsumgebung gleichzeitig ausführen.
Einheitliches Simulationsframework
Das Team hinter Genesis erklärt, dass die Plattform „dynamische 4D-Welten“ generieren kann (eine Simulation einer 3D-Welt mit der zeitlichen Komponente). Das erklärte Ziel besteht darin, eine universelle Engine zu bauen, die in der Lage ist, komplexe physische Welten und Szenarien automatisch zu generieren. Einschließlich interaktiver Umgebungen, Kamerabewegungen, Roboteraufgaben, aber auch Robotersteuerungsrichtlinien und vollständig interaktiven 3D-Szenen. Zhou Xian, ein Forscher an der Carnegie Mellon University und ein wichtiger Mitwirkender des Projekts, weist auf X darauf hin, dass Genesis das Ergebnis einer 24-monatigen Zusammenarbeit ist. „Genesis implementiert ein einheitliches Simulations-Framework, das eine breite Palette modernster physikalischer Löser integriert, um die physische Welt mit maximalem Realismus zu simulieren“, fügt er hinzu.
Über Eingabeaufforderungen erstellte virtuelle Umgebungen
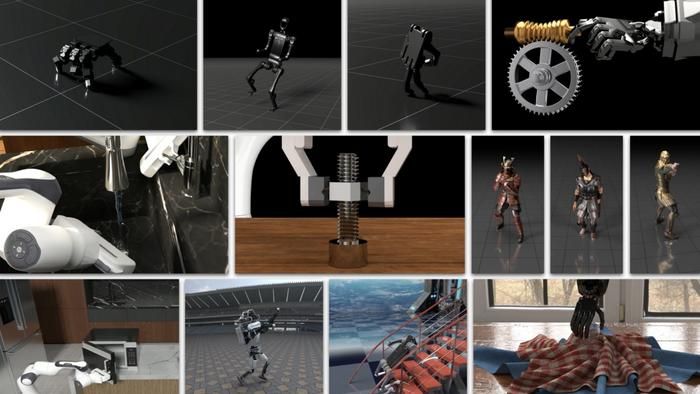
Eine Funktionalität basiert ebenfalls auf generativer KI und ermöglicht die automatische Erstellung vollständiger virtueller Umgebungen aus einfachen Textbeschreibungen (Eingabeaufforderungen). Auf der offiziellen Website des Projekts finden Sie mehrere Beispiele für 3D-Umgebungen, die mithilfe dieser Art von Beschreibungen genau wiedergegeben wurden. „Ein mobiler Arm von Franka ordnet die Bücher auf einem Tisch neu an, indem er die braunen und weißen Bücher schiebt, um sie am roten Buch auszurichten“, veranschaulicht ein Anwendungsfall für ein Robotertraining. Genesis kann auch weiche oder hybride Roboter simulieren (die weiche Haut und ein starres Skelett kombinieren). Beispielaufforderung: „Ein flexibler Greifer navigiert durch eine Schachtel und greift nach einer Stiftkappe.“
Beachten Sie auch, dass Genesis von der plattformübergreifenden Kompatibilität profitiert, mit nativer Unterstützung für GPUs und CPUs von Nvidia, AMD, Apple und Intel unter Windows, macOS und Linux.
Techn



